The WALK-MAN project aimed to develop a humanoid robot that can operate in buildings that were damaged following natural and human-made disasters. The robot focused to demonstrate skills:
- Dexterous, powerful manipulation skills – e.g. turning a heavy valve of lifting collapsed masonry,
- Robust balanced locomotion – walking, crawling over a debris pile, and
- Physical sturdiness – e.g. opening conventional hand tools such as pneumatic drills or cutters.
This project will advance that the robots will be able to walk in and through cluttered spaces (walking in a crowded environment) and maintain their balance against external disturbances, such as contact and impacts with objects or people. The robot demonstrated whole-body motion dynamics and making use of surrounding workspace constraints (handrails, walls, furniture etc). In parallel, team planed to advance the manipulation capabilities of existing humanoids by developing new hand designs that combine robustness and adaptability. This will take advantage of recent developments in mechanical design and materials that allow to be less fragile and delicate end-effectors that are capable of grasping/manipulating traditional hand-tools.
To achieve these goals, the team developed four powerful enabling ideas:
- An integrated approach to whole-body locomotion and manipulation (termed loco-manipulation), where all body parts can be used to ensure more stable and balanced motion. This combined use of arms and legs to create motion will also allow the robot to produce the large manipulation forces needed in a disaster environment,
- the development of a system of loco-manipulation behaviors that control the robot’s perception, cognition and action,
- the use of soft, compliant actuator technologies, to provide more natural adaptability, interaction and robustness, and
- efficient planning algorithms exploiting a robust and consistent control hierarchy based on the theory of motion description languages and symbolic control.
To ensure, the goals are realistic and achievable, we defined strict, real world validation scenarios, that can include (but will not be limited to) those of the DARPA robotic challenge. The Consortium aimed to produce a European entry to the DARPA Robotic Challenge (DRC) to participate in the final trials in December 2014, to which we have been officially invited. However, the work was not driven by the requirements of the challenge or by any agenda other than those set within the EU research framework programs.
Role
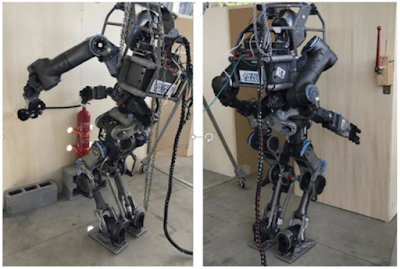
- Design of Walk-Man humanoid, particularly feet design including a force/torque sensor,
- The foot of WALK-MAN has a flat plate profile composed of four layers that create a shock absorbing structure. For the purpose of monitoring the resultant forces at the end effector,
- The foot incorporates a custom six-axis force torque sensor, calibrated with a designed tool,
- Full technical design review on the Walk-Man humanoid robot,
- Research on legs/foot mechanism.
Results
Team introduced WALK-MAN, a humanoid robot that is being developed inside the European Commission project WALK- MAN with the target to demonstrate advanced capabilities including powerful manipulation, robust balanced locomotion, high-strength capabilities, and physical sturdiness, and be able to operate in realistic challenging workspaces. The loco-manipulation motion-generation and control framework that was developed to enable the robot to execute manipulation and locomotion tasks as well as the pilot interface functionality and features were published on major conference and journal. The first validation of the WALK-MAN robot was performed with the participation of our team in the DRC competition where the robot was able to function and execute some of the challenging tasks under the control of a pilot operator. With the participation in the DRC, the first milestone of the project was achieved, and it now continues to reach beyond DRC. In the second part of the project, civil defense bodies are being consulted to tune the robot abilities and future developments and assist to define specifications for a true real- world challenge with realistic and realizable scenarios for WALK-MAN.

References
- WALK-MAN: A High-Performance Humanoid Platform for Realistic Environments, Journal of Field Robotics, 2017.
- An Active Compliant Impact Protection System for Humanoids: Application to WALK- MAN Hands, 2016 IEEE International Conference on Humanoid Robots, pp. 778-785.
- WALK-MAN Humanoid Lower body Design Optimization for Enhanced Physical Performance, 2016 IEEE International Conference on Robotics and Automation (ICRA), pp. 1817 – 1824.
