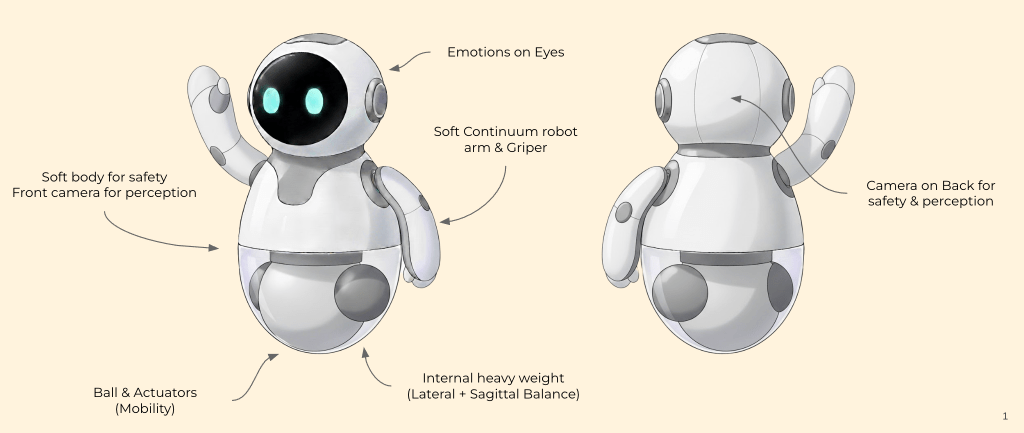
This is a personal open-source project focused on soft body robotics. Although the detailed design is still in development, the project’s high-level direction prioritizes intrinsic safety. The manipulator features a soft continuum mechanism to maximize flexibility and minimize inertia. Mobility is achieved through a three-actuator spherical drive system, enabling omnidirectional movement. To ensure safety during power loss, the design incorporates a low center of gravity (passive stability); this prevents the robot from toppling over, protecting the home environment and vulnerable occupants, such as baby and small children.
System Specifications
General Dimensions & Power
- Height: < 90 cm (3 ft)
- Weight: < 8 kg
- Operating Voltage: 24V – 48V
- Battery Life: > 16 hours
- Max Speed: < 0.7 m/s (2.5 km/h)
- Self-Maintenance: No
- Charging: Docking System Included
Manipulator (Arm)
- Payload: < 1 kg
- Degrees of Freedom (DoF): > 4
- Type: Deformable soft body
Safety
- Stability: Passive stability (Self-balancing/Righting on power loss)
- Mechanism: Pinch-point free design
- Materials: Flame-retardant plastic
- Ingress Protection: Waterproof
Perception (Sensors)
- Primary Vision: Head-mounted cameras (Front & Back)
- Secondary Vision: Head-mounted cameras (Side), Body-mounted cameras (Front & Back)
- Environmental: Temperature, Humidity, Ambient Light
- Audio: Microphone array
Interaction (HRI)
- Visual: Digital Eyes, Interactive Lighting
- Audio: Speaker
- Expression: Whole-body motion
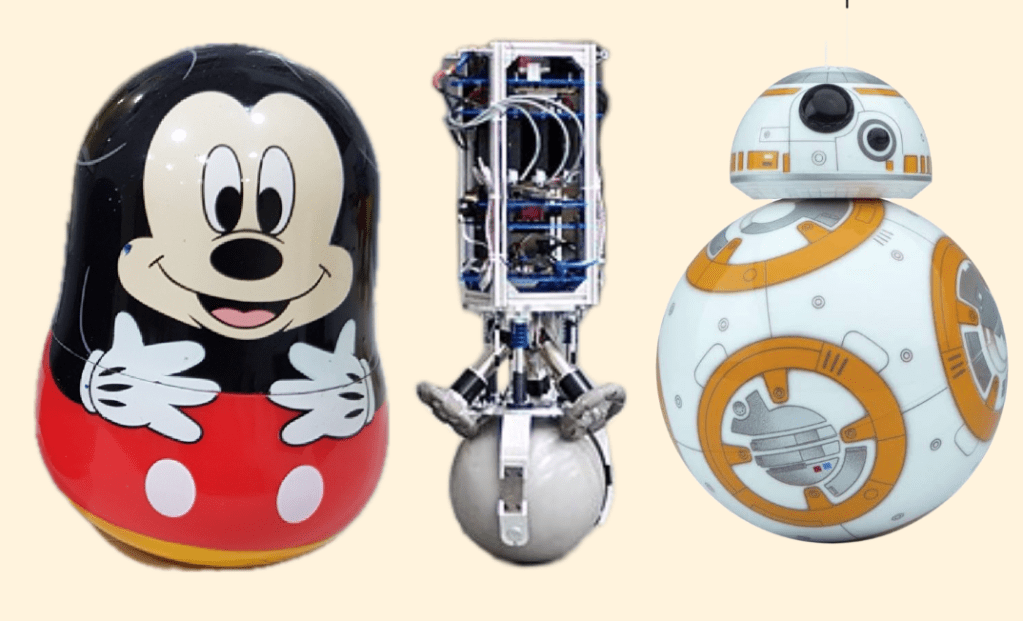
Ideas from
More details are coming soon…
