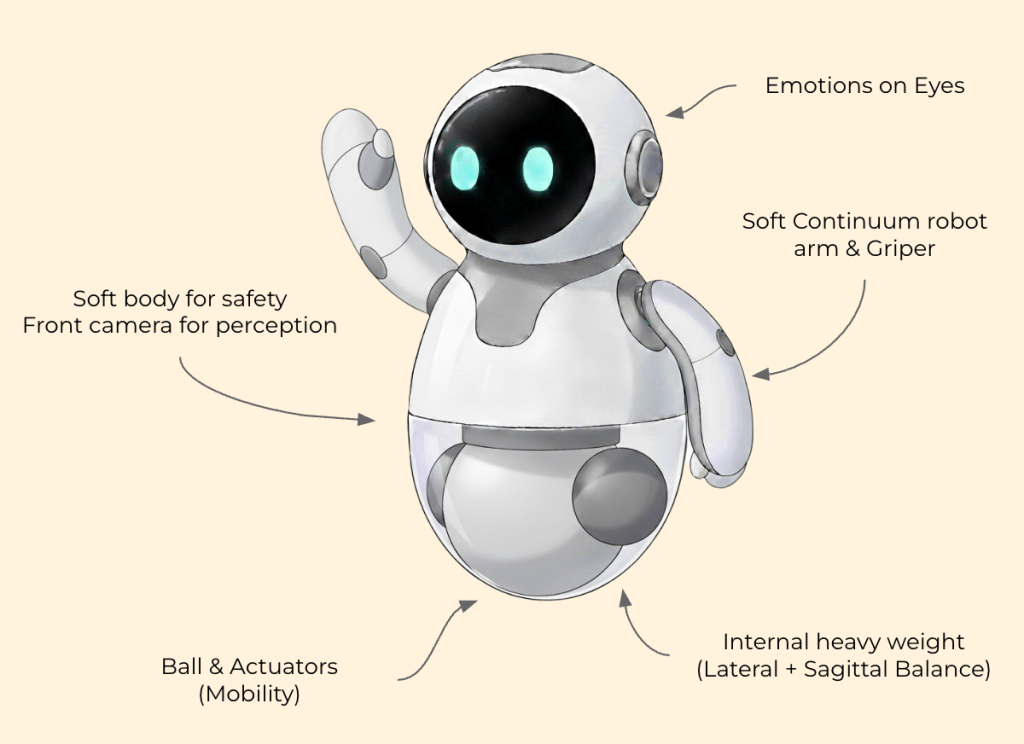
This is a personal open-source project for soft robotics enthusiasts. While the detailed concepts are ongoing, I want to share the high-level direction. The design specifically aims for safety during collisions with people or the environment, as well as during power loss. The arm consists of a soft continuum mechanism for flexibility and low inertia. Mobility is handled by a spherical wheel with three actuators, allowing for rotation and movement in any direction. A counterweight at the bottom prevents the robot from falling over completely when powered off, minimizing the risk of injury to people—particularly babies and children. See some details in the project page.

Leave a comment